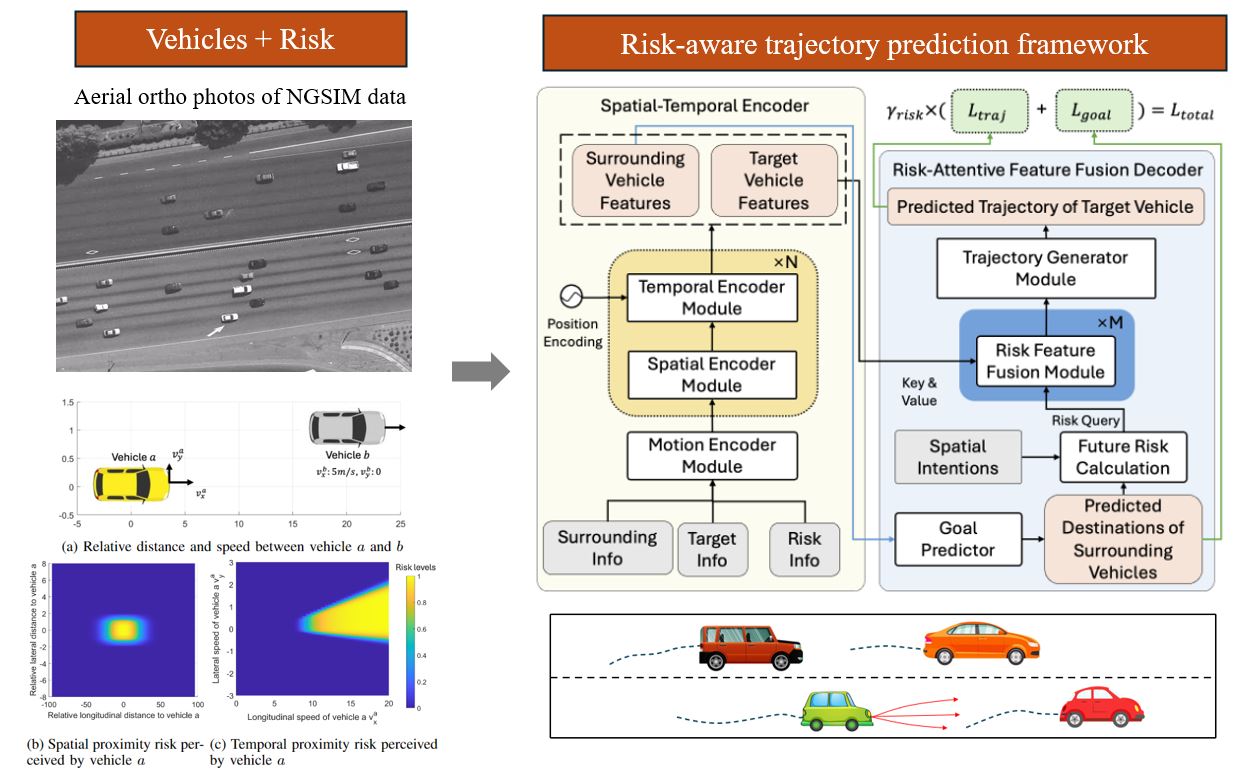
 Accurate and reliable vehicle trajectory prediction is essential for safe and efficient autonomous driving in complex traffic environments. While existing methods typically focus on modeling historical motion patterns and social interactions, they often overlook the potential risks posed by uncertain or aggressive behaviors of surrounding agents. This study proposes a novel future risk-informed trajectory prediction framework that incorporates a risk potential field to assess perceived risks arising from nearby vehicles and road context. The framework integrates an LSTM-based motion encoder and a multi-head attention-based spatial-temporal encoder. A risk-specific feature fusion decoder is introduced to embed the risk potential field into the extracted spatial-temporal feature representations for multi-modal trajectory prediction. The proposed framework provides interpretable, risk-aware predictions, contributing to more robust planning and decision-making in autonomous driving systems.
Accurate and reliable vehicle trajectory prediction is essential for safe and efficient autonomous driving in complex traffic environments. While existing methods typically focus on modeling historical motion patterns and social interactions, they often overlook the potential risks posed by uncertain or aggressive behaviors of surrounding agents. This study proposes a novel future risk-informed trajectory prediction framework that incorporates a risk potential field to assess perceived risks arising from nearby vehicles and road context. The framework integrates an LSTM-based motion encoder and a multi-head attention-based spatial-temporal encoder. A risk-specific feature fusion decoder is introduced to embed the risk potential field into the extracted spatial-temporal feature representations for multi-modal trajectory prediction. The proposed framework provides interpretable, risk-aware predictions, contributing to more robust planning and decision-making in autonomous driving systems.
